NeuS
NeuS项目主页:NeuS: Learning Neural Implicit Surfaces by Volume Rendering for Multi-view Reconstruction
Motivation
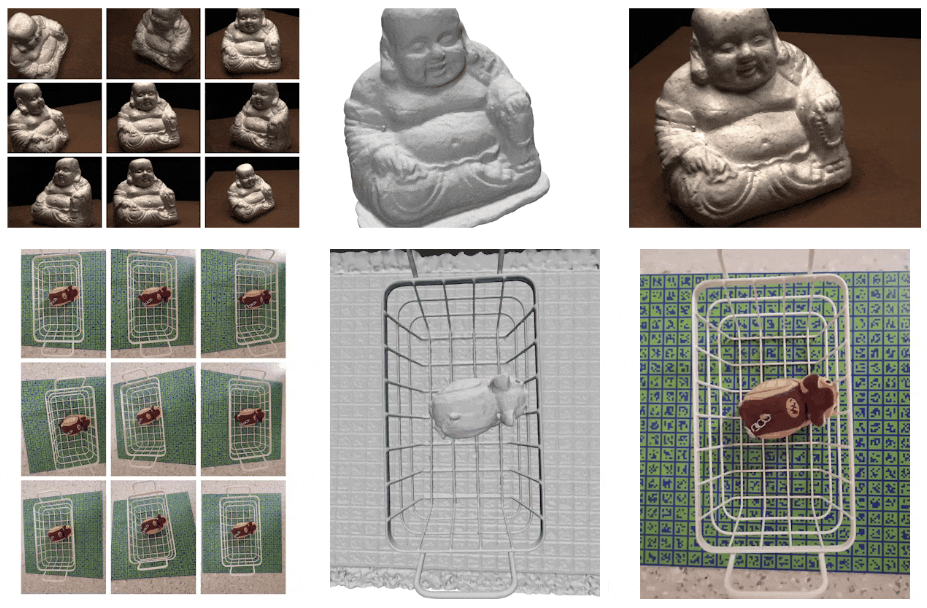
- 本文目的:从多视角2D图片,重建物体的3D表面。
- 传统的神经表面重建工作(DVR,IDR)要求前景 mask 做监督,并且容易陷入局部最小值,因此难以重建具有自遮挡或薄结构的物体;
- 对 NeRF 及其变体通过深度学习生成的高质量隐式表面没有足够的表面限制,难以提取高质量表面。
Contribution
- 提出了一种新颖的神经表面重建方法——NeuS(Neural surface Reconstruction):将表面表示为符号距离函数(SDF: signed distance function)的零水平集(zero-level),通过新式的体渲染(volume rendering)方法来训练 SDF 表示;
- 相对于传统体渲染方法,提出一种在一阶估计中无偏的公式,达到更精确的表面重建甚至可以不用 mask 监督。
Input & Output
- Input: 多视角RGB图片、对应图片的相机位姿,Mask(可选)
- Output: SDF
Method
Scene representation
NeuS 是隐式表面重建,通过将待重建表面表达为 SDF 函数的零水平集,利用 MLP 和体渲染方法学习出这种神经 SDF 表示,具体场景表示建模如下:
SDF: $f:\mathbf{x}\in\mathbb{R}^3\to signed\ distance\in\mathbb{R}$,$\mathbf{x}$ 为空间位置;
- 默认待重建表面是水密的(密闭的);
- SDF 表示空间任一点到待重建表面的有向距离,当该点在物体外部时距离为正,在物体内部时距离为负,
Logistic density distribution:$\phi_s(x)=s e^{-s x}/(1+e^{-s x})^2$;
- 即 Sigmoid 函数 $\Phi_s(x)=1/(1+e^{-sx})$ 的导数,$\phi^\prime_s(x)=\Phi^\prime_s(x)$;
- 事实上 $\phi_s(x)$ 可以是任意以 $0$ 为中心的单峰密度分布,这里出于计算方便;
- 标准差为 $1/s$,也是一个可训练的参数,希望最终收敛 $1/s\sim 0$;
待重建的表面被表示为 zero-level 集:$\mathcal{S}={\mathbf{x}\in\mathbb{R}^3|f(\mathbf{x})=0}$;
- 密度函数 S-density:$\sigma(\mathbf{x})=\phi_s(f(\mathbf{x}))$;
- 辐射场函数 $c:(\mathbf{x,v})\in\mathbb{R}^3\times\mathbb{S}^2\to\mathbb{R}^3$,$\mathbf{v}$ 为观察方向;
- 对空间任一点 $\mathbf{x}$,在给定观察方向 $\mathbf{v}$ 下的颜色值;
期望的是训练结果,待重建的表面SDF接近于 $0$,其他地方为有向距离;并且训练收敛后 $1/s\sim 0$,S-density $\phi_s(f(\mathbf{x}))$ 在待重建的表面附近有显著的高值,其他位置趋近于 $0$(如下图)。
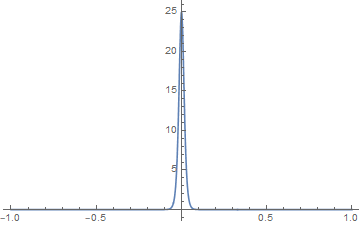 |
Volume Rendering
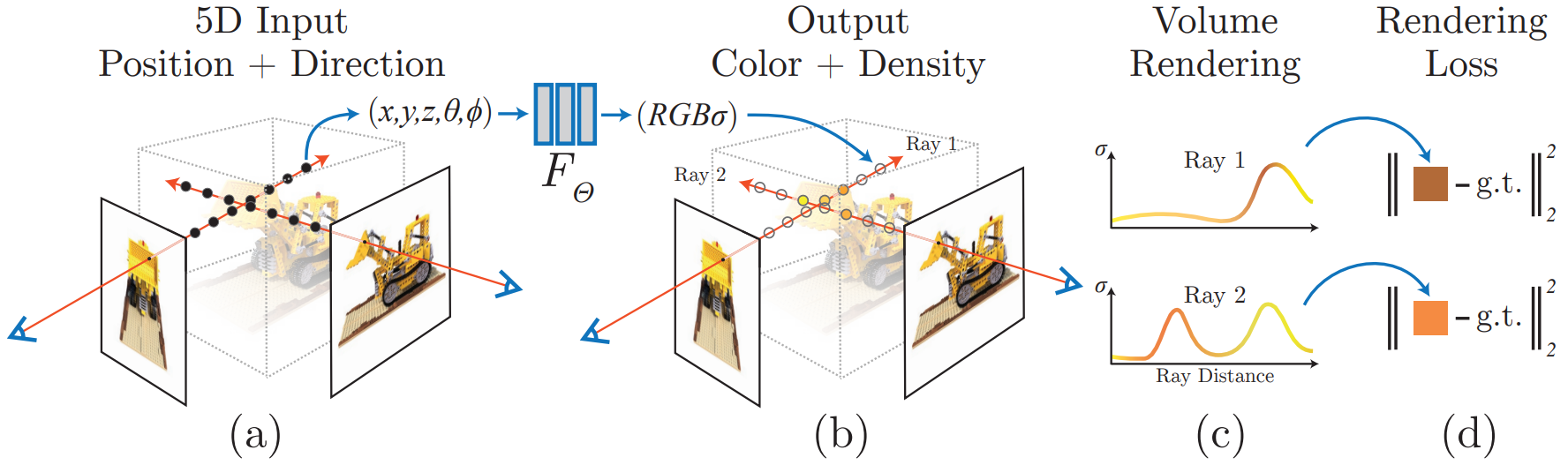
为了学习(训练)神经SDF表示和辐射场的参数,作者建议采用体渲染的方法来渲染SDF表示中的图片,所以,对任一图片内给定像素,其基于相机内部光心原点 $\mathbf{o}$ 在观察方向 $\mathbf{v}$ 发出的一条光线 ${\mathbf{x}(t)=\mathbf{o}+t \mathbf{v}|t\geq 0}$,沿光线累积颜色:
$w(t)$ 为点 $\mathbf{x}(t)$ 的权重,$C(\mathbf{o,v})$ 即为这个像素的输出颜色。
Requirements on weight function
可以说,从 2D 图片学习精确的 SDF 表示的关键就在于构建出一种输出的颜色值与 SDF 的合适的联系,也即,基于场景的 SDF $f$ 推导出一个合适的权重函数。对权重函数的要求如下:
无偏性(Unbiased)。在光线与表面交点处 $\mathbf{x}(t^\ast)$,也即:$f(\mathbf{x}(t^\ast))=0$ 时,$w(t)$ 达到局部最大值;
- 保证光线与表面(SDF零水平集)交点对像素颜色贡献最大;
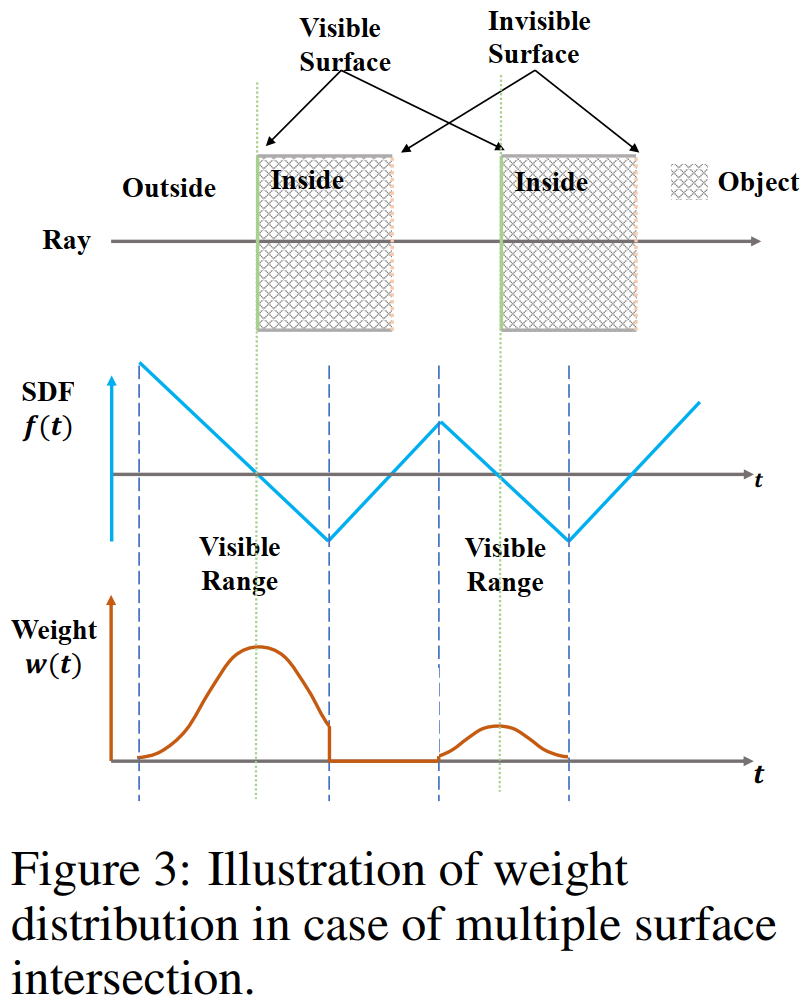
感知遮挡(Occlusion-aware)。
即更靠近相机的点有更大的权重,也即对最终的输出颜色贡献更大;
确保当光线依次通过多个表面时,渲染过程将正确地使用离相机最近的表面的颜色来计算输出颜色。
在传统的体渲染中:$w(t)=T(t)\sigma(t),\quad T(t)=exp(-\int_0^t \sigma(u)d u)$ 为沿光线累积透射率(accumulated transmittance),$\sigma(t)=\phi_s(f(\mathbf{x}(t)))$ 为体密度(volume density)。——遮挡感知的,但是有偏的,会在重建表面引入固有错误(如下图,在表面交点处,权重函数并没有局部最大)。
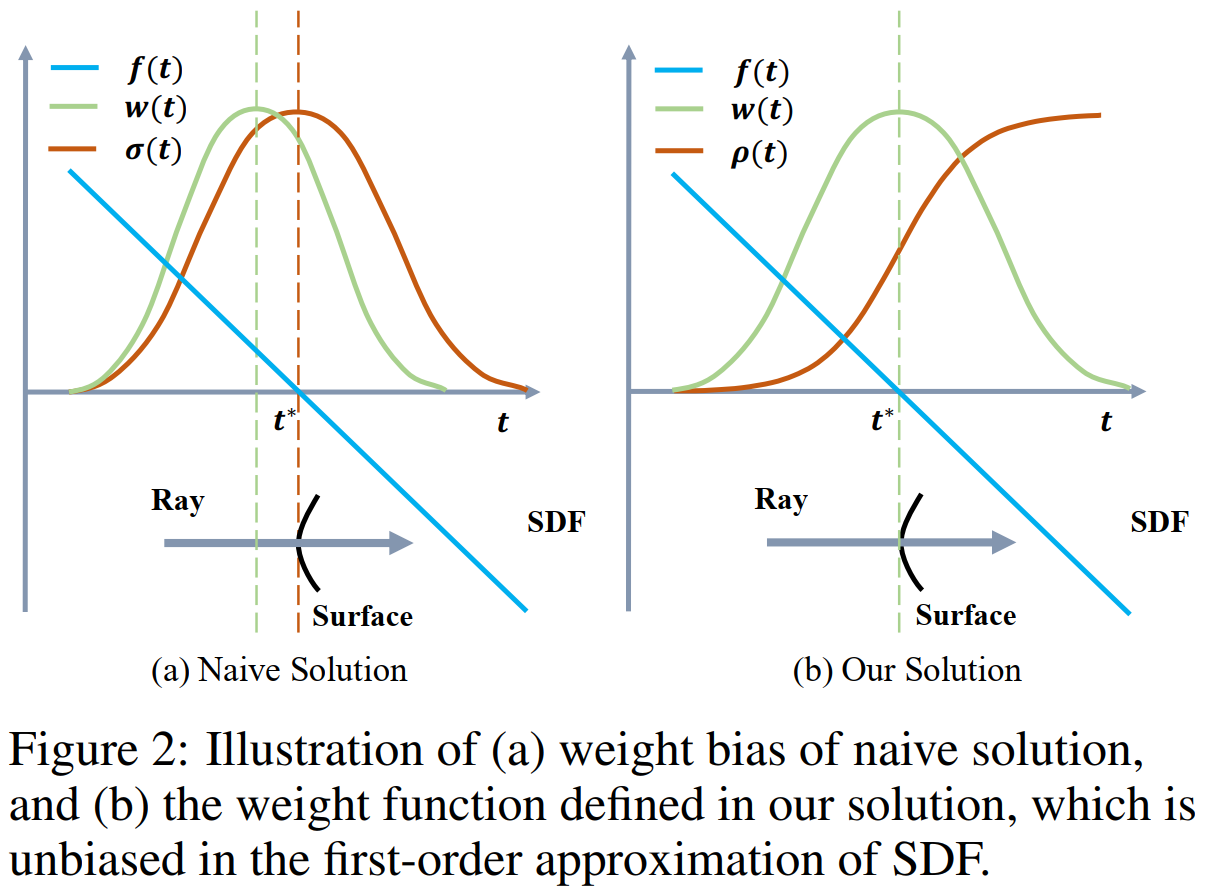 |
 |
Discretization
为了对不透明密度和权重函数的离散化形式,采用类似 NeRF 中的同样的估计方法。沿光线采样 $n$ 个点,从而沿此光线的像素处颜色为 :
有关 $\alpha_i$ 的详细推导参见原文的附录。
Training
通过在每次迭代中,从一张图片内随机的选取一部分(batch)像素以及世界空间 $P={C_k,M_k,\mathbf{o}_k,\mathbf{v}_k}$ 内相应的光线来优化神经网络和上述标准差的倒数($1/s$),其中 $C_k$ 为像素的真实颜色,$M_k\in{0,1}$ 为可选的 Mask 的值,即是否有 Mask。$n$ 为采样点数,$m$ 为 batch size。
损失函数:
光度(颜色)损失:
- 监督渲染颜色接近真实值颜色
Eikonal loss:
约束 MLP 学习出的 SDF 的导数满足导数模长等于 1 的性质;
简单证明:
假设上述 $f$ 是定义在 $\Omega\in\mathbb{R}^3$ 上的 SDF,
对 $\forall \mathbf{x}\notin\partial\Omega$,存在一个最近点 $\mathbf{y}\in\partial\Omega$,
因此 $\mathbf{v}=(\mathbf{y-x})/\parallel\mathbf{y-x}\parallel$ 是最速下降方向,也即与 $\nabla f(\mathbf{x})$ 同向,
又因 $f$ 定义,即恰好表示其到最近点的距离,
故沿 $\mathbf{v}$ 方向移动一单位,$f$ 也变化一单位,
即方向导数满足 $D_v f=\nabla f(\mathbf{x})\cdot\mathbf{v}=\parallel\nabla f(\mathbf{x})\parallel\parallel\mathbf{v}\parallel\cos\theta=1$,
故 $\parallel\nabla f\parallel=1$。
可选的掩码损失:
- $\hat{W}_k$ 沿相机光线的权重总和,$BCE$ 是二元交叉熵损失。
分层采样(Hierarchical sampling):
- 首先沿射线均匀采样 64 个点,然后迭代进行 $k=4$ 次的重要性采样。
- 只维护一个网络(不像NeRF中同时维护粗糙和精细两个网络)
- 粗采样的概率基于固有标准差的 S-density $\phi_s(f(\mathbf{x}))$ 计算;
- 精细采样的概率则是基于学习到的 $s$ 的 $\phi_s(f(\mathbf{x}))$ 计算;
- 具体细节参见原论文附录以及渲染代码。